// Mechanical Subsystems
Motor-Driven Golf Ball Transport Mechanism
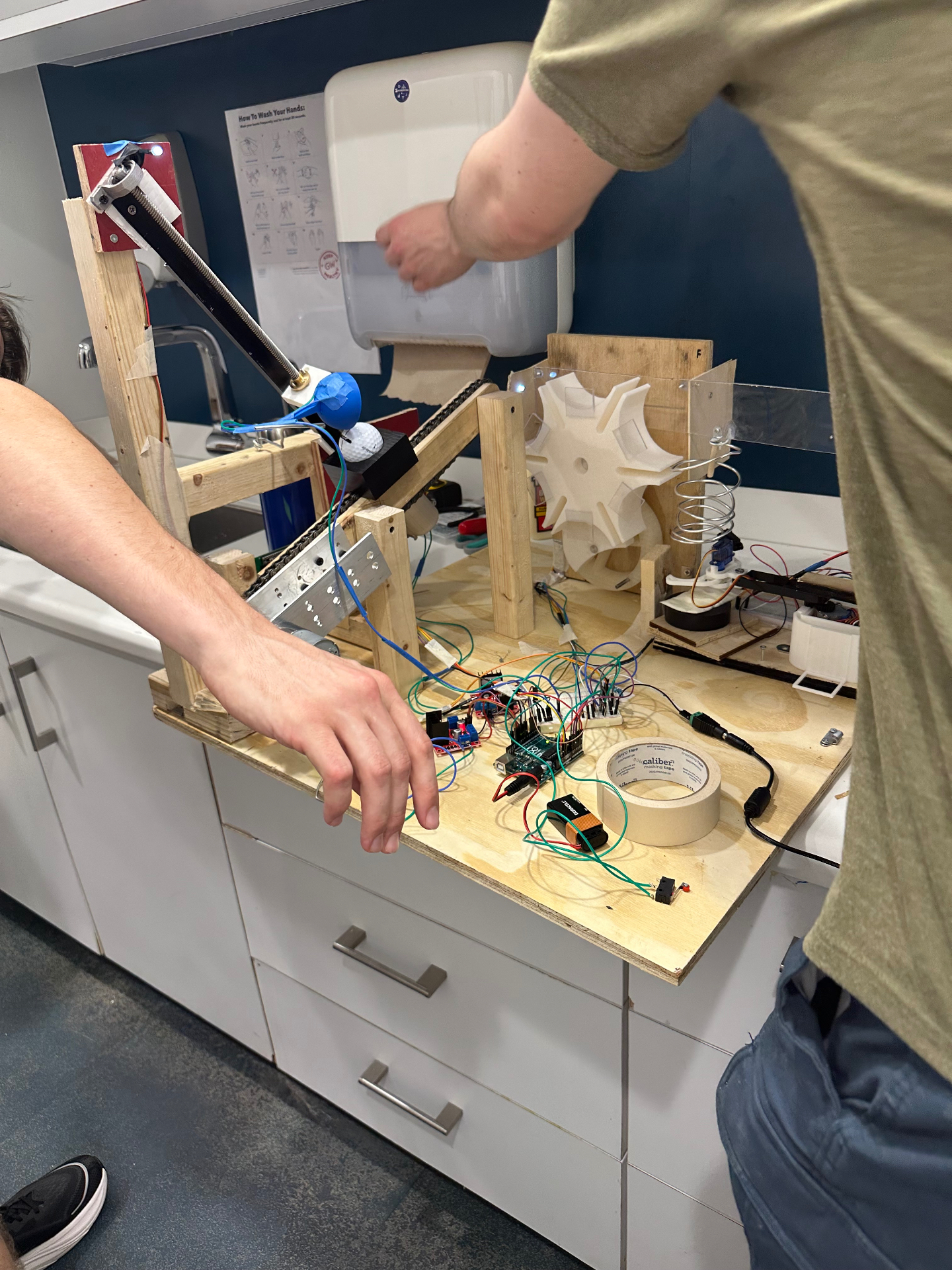
Two-legged pole-and-belt mechanism that holds and moves a golf ball within a 5-second target, driven by an Arduino-controlled DC motor.
Overview
MAE 3192 design challenge: build a mechanical subsystem that holds a golf ball and moves it across a defined distance within 5 seconds. Constraints on actuators, materials, and budget pushed the team toward a simple, reliable mechanism.
Approach
I designed a two-legged pole structure carrying a belt-and-pulley system driven by a DC motor. A small carrier box with a golf-ball-shaped dent was nailed to the belt; when the motor spun, the belt translated the carrier across the pole. Control was handled by an Arduino driving the motor through an H-bridge.
My contribution
I led mechanism concept selection, CAD modeling in SolidWorks, prototyping (3D printing and fabrication), and Arduino-based motor control. The team iterated on belt tension, carrier geometry, and motor PWM until the 5-second target was reliably met.
Result
A working mechanism that consistently transported the golf ball within the time target during demo runs — a satisfying mix of mechanical design, fabrication, and embedded control.
Next project
Fishing Reel Teardown →
Reverse Engineering